全国大学生机械创新设计大赛一等奖
船舶漂角教具
船舶在航道内航行时,受到来自水流、风吹等外力因素以及人为因素的影响,船舶的纵轴线与航迹线间会形成一的夹角,这一角度称为船舶航行的漂角。在学习船舶操纵性这门课程的过程中,船舶回转运动中的漂角一直是好多同学很难理解的问题,同时,由于没有实际的装置能够模拟出这一运动状态,也增加了老师的授课难度,为此,吕元博、王春雷、杨显原同学通过理论研究与实验自主设计了这套船舶漂角演示教具,以期能很好的模拟出船舶回转运动以及回转过程中产生的漂角以及横倾现象等。该作品设计巧妙,通过凸轮与行星轮的结合,使旋转与伸缩同时进行,从而完成复杂轨迹的运动,船模底部的万向轮和上下层圆盘的运动配合,从三维角度上实现了船舶在回转运动中的横倾现象,利用杆的伸缩控制模拟控制回转半径与舵角的大小,制作成本较低适合课堂教学应用。这也是我校历年来首次入选全国总决赛,并代表我校荣获全国一等奖。

全国大学生智能车竞赛一等奖
全国大学生智能车竞赛是以智能汽车为研究对象的创意性科技竞赛,其设计内容涵盖了自动控制、模式识别、传感技术、汽车电子、电气系统、计算机软件开发、嵌入式系统设计、机械设计等多个学科的知识。我校敖焕轩、吴俊峰和张勇同学组成的参赛队伍按大赛要求,制作了能够自主识别道路、实现自动避障的智能小车。该智能车系统以飞思卡尔 16位单片机 MC9S12XS128MAL 为核心,对小车进行速度控制和方向控制。这两个控制都通过 PID 算法来实现。车模速度控制利用霍尔编码器测速,通过 PI 算法控制电机的转速来实现车轮转速的闭环控制;车模方向控制利用线性CCD来检测跑道的黑线,通过 PD 算法控制舵机打角实现车模的转向控制。除主CCD外,还增加了纵向CCD识别强制掉头区、小s与长直道;利用陀螺仪识别坡道;利用红外对管识别起跑线。在本届大学生智能车竞赛中我校力克大连理工大学、哈尔滨工业大学、东北大学代表队以东北地区第一名的成绩入选全国总决赛,并代表我校首次荣获全国一等奖。

全国大学生交通科技竞赛二等奖
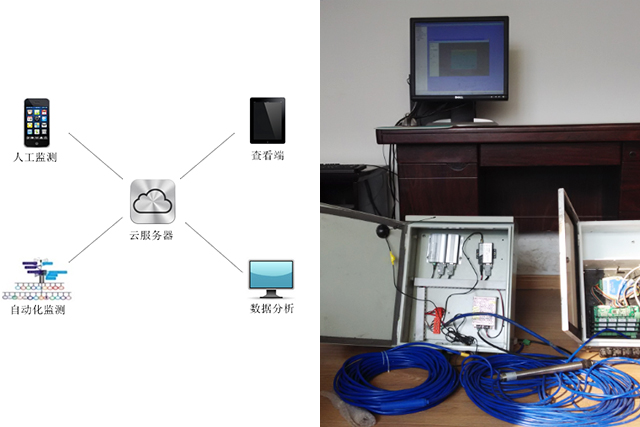
基于多元信息反馈优化的隧道超前预警系统
由我校关文、孙呈帅、仇耀宗同学共同研发的“基于多元信息反馈优化的隧道超前预警系统”,在2014年全国大学生交通科技竞赛中荣获二等奖。该系统基于物联网技术对隧道施工过程中地表沉降、净空收敛、隧道围岩压力、钢拱架应力等数据进行实时采集与分析,并且通过多种方式查看隧道当前状态。意在帮助工程师及时发现隧道施工过程中的危险情况,从而采取有效措施,保证隧道安全。自动化监测和人工监测信息通过移动网络接入“云”端,数据可以被数据分析终端、查询终端等调用。该系统可以与自主研发的软件PRM 1.0、PRS 1.0以及EEOS 1.0配合使用,完成基于云计算的隧道信息化分析,能够极大提高隧道施工监测数据分析的效率和可靠性。
供稿:大学生创新教育与实践中心

